|
HGCal Test Beam
03a93d6239a951948e06fb3ef8dae4cbdebfad30
|
|
HGCal Test Beam
03a93d6239a951948e06fb3ef8dae4cbdebfad30
|
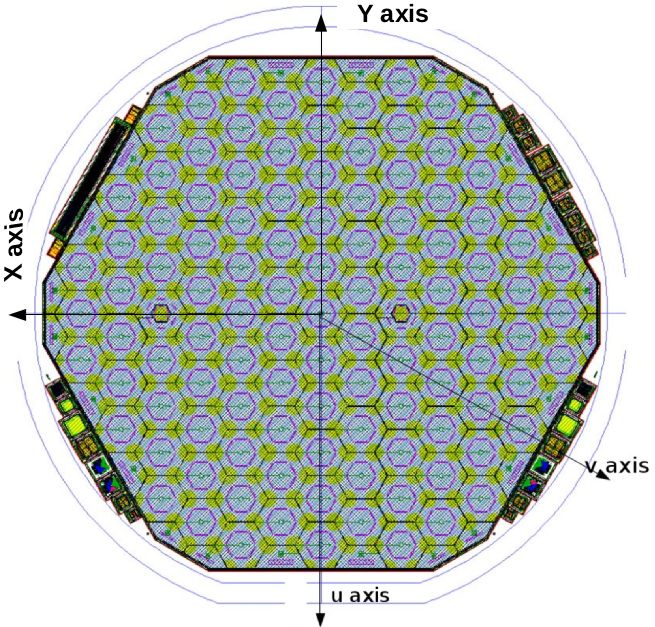
Two coordinate systems have been defined:
The absolute coordinate system is identified by (x,y,z), the local system by (iu, iv, sensor_iU, sensor_iV, iLayer) where
Conversion between the local system and the lab frame is done by HGCalTBCellVertices
Sensors in odd and even layers are rotated around the y axis, the local coordinate system is NOT rotated, the relation between the local system and the lab frame are always the same. So the calibration pads in odd and even layers are in different (iu, iv) positions. This is taken into account by the conversion between electronic ID and detId in the HGCalTBRawToDigi
 1.8.5
1.8.5

